Bu teknik dokümanda MSC Nastran ve Patran yazılımlarının kullanımı aracılığıyla, kontak modeli kontrolünün nasıl yapıldığı incelenecektir. “Contact Result” ve “Contact Check” yapma, BCONCHCK komut tanımlanması, kontak modeli kullanıldığında ve kullanılmadığında sonuçların yorumlanması hedeflenmektedir.
1- Giriş
Kontak modelleme, mühendislik simülasyonlarında birden fazla katı cisim arasındaki etkileşimlerin gerçekçi bir şekilde simüle edilmesini sağlamaktadır. Özellikle mekanik montajların, hareketli parçaların ve kontak bölgelerinin doğruluğunu artırmak için bu teknik büyük önem taşımaktadır.
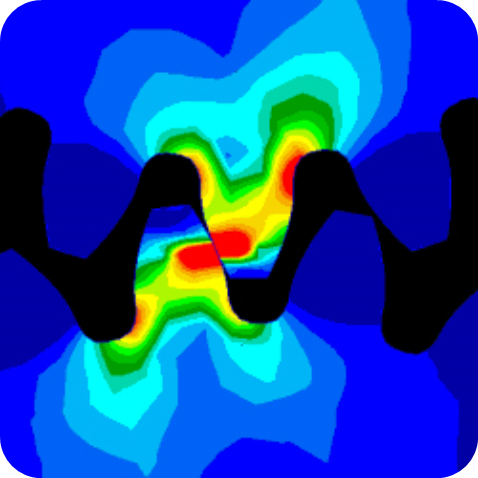 Figür 1 – Patran’da Örnek bir Kontak Sonucu Stres Dağılımının Gösterimi
Figür 1 – Patran’da Örnek bir Kontak Sonucu Stres Dağılımının Gösterimi
MSC Nastran/Patran “Kontak Modeli Kontrolü” aracı kullanılarak model içerisinde yer alan kontakların düzgün bir şekilde çalışıp çalışmadığı incelenebilmektedir.
Bu teknik yazı, kontak modelleme süreçlerini ve kontrol yöntemlerini detaylandırarak, mühendislerin yapısal analizlerinde daha doğru ve güvenilir sonuçlar elde etmelerini sağlamaktadır. Analizde doğru kontak ayarlarının yapılması, simülasyonların daha hızlı tamamlanmasına ve daha gerçekçi sonuçlar elde edilmesine olanak tanımaktadır.
2- Kontak Modeli Kontrolü: Nedir ve Nasıl Kullanılır?
Kontaklar, montaj içindeki parçaların birbirleriyle olan etkileşimlerini simüle etmek için kullanılmaktadır. Bu etkileşim, iki parçanın birbirine temas ettiği, kaydığı veya tamamen ayrıldığı durumları modellemek için kritik öneme sahip olmaktadır. Ancak kontakların doğru bir şekilde modellenmemesi durumunda, analiz sırasında hatalar ortaya çıkabilir ve bu da sonuçların güvenilirliğini etkilemektedir. Kontak model kontrolü, bu hataların önlenmesine yönelik önemli bir adımdır. Analiz başlamadan önce kontakların doğru bir şekilde ayarlandığından emin olmak, sonrasında karşılaşılabilecek hesaplama hatalarını ve model uyumsuzluklarını minimize etmektedir. Bu kontrolün yapılması özellikle büyük montajlarda, kompleks temas noktalarında ve karmaşık mekanik sistemlerde önem arz etmektedir.
Kontak koşulunu bir modele doğru şekilde ekleyerek daha gerçekçi bir model oluşturmak mümkündür. Ancak analiz modeline yanlış kontak tanımlamalarının eklenmesi hatalara sebep olabilir.
 Figür 2 – Kontak Varlığında ve Yokluğunda Yapının Aldığı Şekil
Figür 2 – Kontak Varlığında ve Yokluğunda Yapının Aldığı Şekil
Kontak modeli kontrolü, analiz tam çalıştırılmadan önce yapılabilmektedir. Bu özellik, kontak kontrolü sonuçlarını içeren bir HDF5 dosyası yazmaktadır.
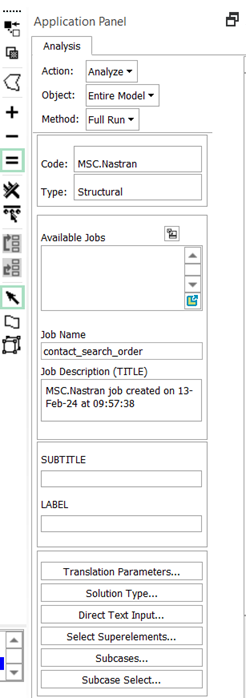
Patran yazılımında kontak kontrolü yapmak için aşağıdaki şekillerde yer alan adımlar izlenmelidir. Ana sekmelerden, “ANALYSIS” sekmesine girilir, “Solution Type” kısmından SOL101 (Linear Statik Senaryo) seçilir. “Subcases” sekmesine girilir ve burada “Output Requests” sekmesi tıklandıktan sonra açılan sekmeden “Contact Check” ve “Contact Results” seçilerek hesaplanması istenir ve bunlara göre sonuçlar incelenir.
 Figür 3 – Patran Yazılımı Arayüzü Analysis Sekmesi
Figür 3 – Patran Yazılımı Arayüzü Analysis Sekmesi
 Figür 4 – Analysis Sekmesi Arayüzü
Figür 4 – Analysis Sekmesi Arayüzü
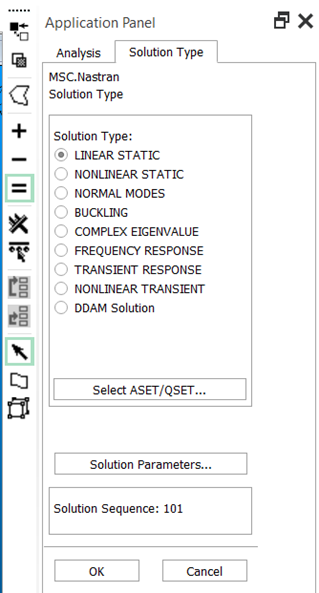 Figür 5 – Solution Type Seçimi (Linear Static)
Figür 5 – Solution Type Seçimi (Linear Static)
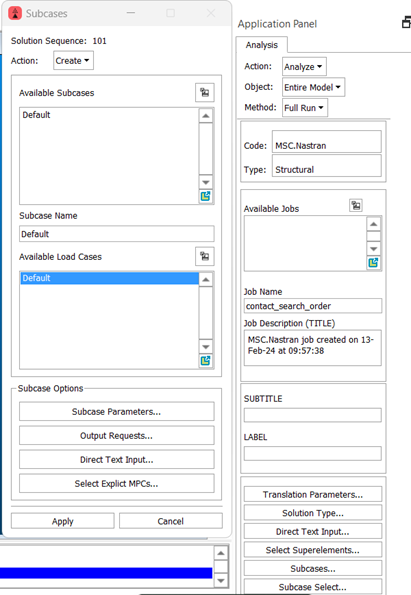 Figür 6 – Subcases ve Output Requests Seçimi
Figür 6 – Subcases ve Output Requests Seçimi
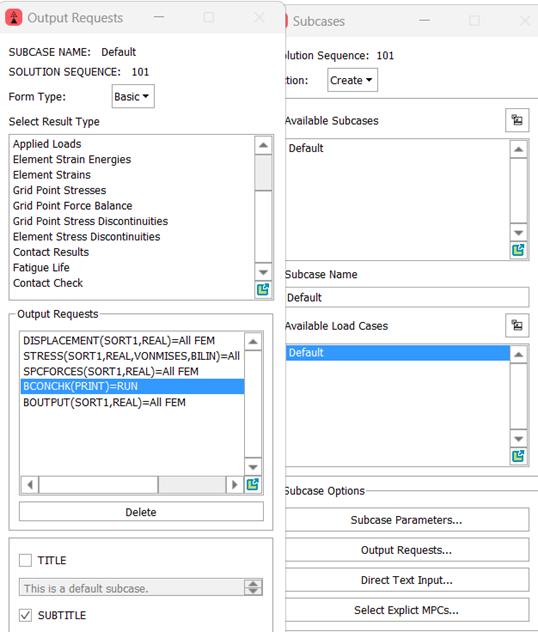 Figür 7 – “Contact Check” ve “Contact Results” Talep Edilmesi
Figür 7 – “Contact Check” ve “Contact Results” Talep Edilmesi
3- Kontak Ayarlarının Teknik Detayları
Kontak ayarlarının doğru yapılması, analizlerin sonuçlarını büyük ölçüde etkilemektedir. Örneğin, kontak mesafesi kontrolü, kontak gövdeleri arasındaki en kısa mesafeyi belirlerken, analiz hassasiyetini artırmak için optimize edilmelidir. Mesafe kontrol toleransı, çok hassas analizlerde daha düşük tutulabilir, bu da modelin gerçek dünya davranışını daha doğru bir şekilde temsil etmektedir. Öte yandan, öteleme kontrolü, kontak gövdeleri arasındaki göreceli deplasmanların izlenmesini sağlar ve genellikle deformasyon analizlerinde kullanılmaktadır.
Patran yazılımında incelenebilecek sonuç çıktıları aşağıdaki maddelerde açıklanmaktadır;
- Kontak Kontrolü – Mesafe (Distance)
Bu çıktının değeri, tanımlanmış bir mesafe kontrol toleransı dahilinde temas eden kontak gövdesi çiftlerinin node’ları arasındaki en kısa (skaler) mesafedir.
Mesafe toleransının dışındaki node’lar kontrol edilmez ve bu nedenle çizilecek mesafe verileri yoktur.
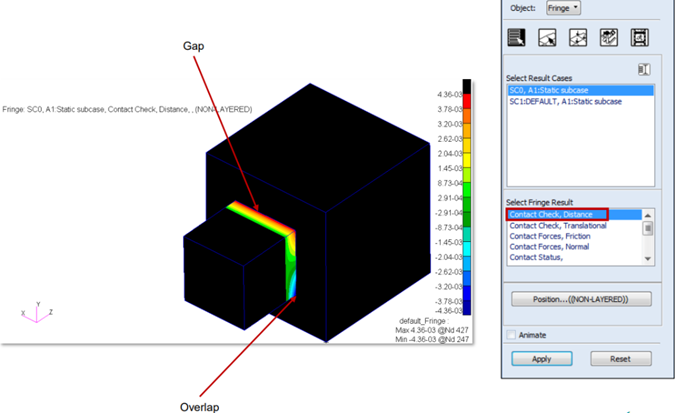 Figür 8 – Sonuç Ekranında, “Contact Check, Distance” Gösterimi
Figür 8 – Sonuç Ekranında, “Contact Check, Distance” Gösterimi
Negatif değerler o düğümdeki (node) kontak gövdesi çiftinin nüfuziyetini (penetrasyonunu) göstermektedir. Sıfır değeri, cisimlerin o düğüm (node) civarında sadece yüzeylerine temas ettiği anlamına gelmektedir. Pozitif değerler ise bir boşluğu belirtmektedir.
- Kontak Kontrolü – Öteleme (Translational)
Bu çıktının değeri, tanımlanmış bir mesafe kontrol toleransı dahilinde temas eden kontak gövdesi çiftlerinin ilgili düğümleri arasındaki en kısa (vektör) mesafedir. Mesafe (Distance) değerinden farklı olarak; vektörel biçimde (yön ve büyüklük) gösterim sağlamaktadır. Sonucun X, Y ve Z bileşenleri olması dışında “Kontak Kontrolü, Öteleme” Mesafe değerine benzemektedir.
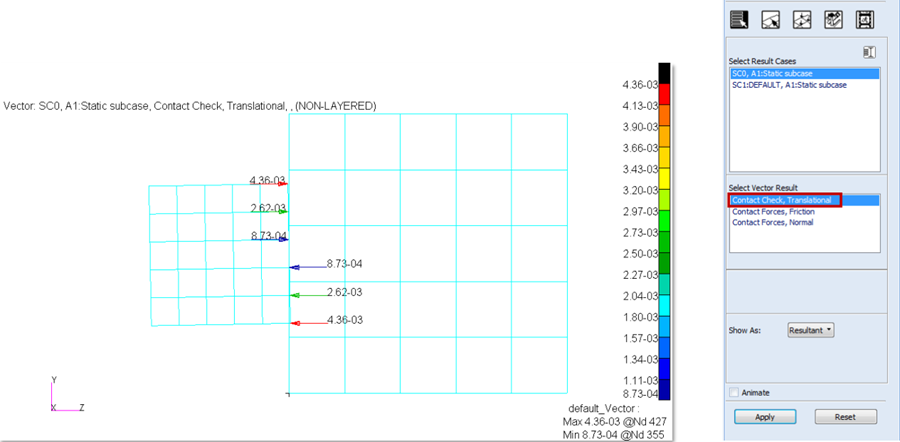 Figür 9 – Sonuç Ekranında “Contact Check, Translational” Gösterimi
Figür 9 – Sonuç Ekranında “Contact Check, Translational” Gösterimi
Çıktı dosyasında rapor edilen vektör değerleri, “İşaret Grafiği” aracılığıyla gösterilebilmektedir. Bu sonuçlar her zaman pozitiftir ve önceki sonuçlarda olduğu gibi boşluk veya nüfuziyet durumunu göstermez.
- Kontak Ayarı – Öteleme (Translational)
Eğer kontak gövde çiftleri için “başlangıçta gerilme serbest” ayarı yapılmışsa (Giriş dosyasındaki BCONPRP girişinde ICOORD=1 olarak, aynı zamanda Patran’da “Inital Stress Free”), o zaman gerilme serbest başlangıç temas koşulunu sağlamak için gereken tüm penetrasyona uğrayacak düğümler (node) için gerçek göreceli deplasmanlar çıkış olarak verilmektedir.
Etkilenen kontak gövde çiftlerinin tüm düğümlerinin göreceli deplasmanları çıkış olarak verilir ve deformasyon veya geometrik sınırları belirten kenar (fringe) çizimleri olarakolarak çizilebilmektedir.
4- BCONCHK Komutu ve Kullanımı
“BCONCHK” komutu, MSC Nastran'da kontak modelinin doğrulanması için kullanılır ve özellikle karmaşık montajlarda kontak hatalarını önceden tespit etmek için son derece önemli olmaktadır. Bu komut, analizin tamamlanmadan önce durdurulmasını sağlar ve kontakların doğru şekilde ayarlandığını kontrol eder. Bu sayede, olası kontak hataları erken aşamada tespit edilir ve analiz süresinin verimli kullanılması sağlanır. Özellikle karmaşık mekanik sistemlerde veya büyük montajlarda, bu komutun kullanılması zaman kazandırmasının yanında analiz sonuçlarının doğruluğunu arttırmaktadır. Örneğin, uçak gövdelerindeki çoklu kontak bölgelerinde, BCONCHK komutu kullanılarak tüm kontakların doğru bir şekilde yerleştirildiğinden emin olunur.
Bu girdi, SOL 101, 103, 105, 107, 108, 109, 110, 111, 112, 200 ve 400’de analiz öncesinde kontak modeli kontrolünü etkinleştirmek için kullanılır. BCONCHK girdisi, 3 farklı fenomen ile talep edilebilmektedir.
BCONCHK(PRINT,PLOT)=RUN or STOP or STEP
- RUN: Kontak modeli kontrolünü gerçekleştirir ve analizi normal şekilde yapar.
- STOP: Sadece Kontak kontrolünü çalıştırır ve tam analizi yapmadan işlemi sonlandırır.
- STEP: Her çıktı isteği LOAD/TIME adımında Kontak kontrolünü gerçekleştirir.
Figür 10’da gösterildiği gibi, Patran’da açılır menüden kontak kontrol ayarı, “Full Run” seçildiğinde, MSC Nastran girdi dosyasına; “BCONCHK=RUN” yazılmaktadır. “Check Run” seçildiğinde, MSC Nastran girdi dosyasına “BCONCHK=STOP” yazılmaktadır.
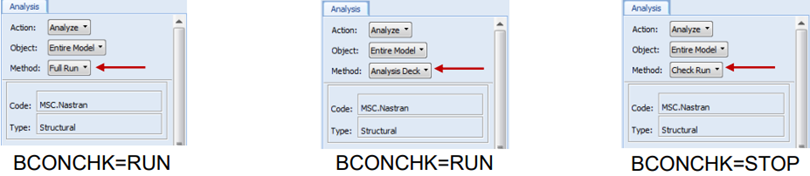 Figür 10 – BCONCHK Komutu Uygulaması
Figür 10 – BCONCHK Komutu Uygulaması
“Full Run” için MSC Nastran kontak modeli kontrolünü yapar, ardından full kontak analizini çalıştırmaya devam eder.
“Check Run” için, kontak modeli kontrolü tamamlandıktan sonra analiz durdurulur ve kullanıcının tam analizi çalıştırmadan önce kontak modeli kontrolü sonuçlarını görmesine izin verir.
Kontak modeli kontrolü yapılması için “BCONCHK=RUN” yazılmalıdır ve kontak kontrolünden hemen sonra iş çalıştırılmalıdır. Bu, kullanıcının “Full Run” analizinden önce kontağı kontrol etmesine izin vermemektedir.
Kontak modeli kontrolü yapıp işi durdurmak için “BCONCHK=STOP” yazılmalıdır. Bu, analizi çalıştırmadan önce kontak modeli sonuçlarını görmek için bir sonuç dosyası oluşturmaktadır.
Kontak kontrolünden sonra analizi durdurmak için analiz yöntemini “Check Run” olarak değiştirmek gerekmektedir.
5- Sonuçlar
Bu çalışmada elde edilen sonuçlar, mühendislik tasarımlarında kontak noktalarının nasıl optimize edilebileceğini ve analizlerin doğruluğunu artırmak için hangi tekniklerin kullanılabileceğini göstermektedir. Kontak kontrolü yapılarak, analizlerin daha güvenilir hale gelmesi ve olası hataların önceden tespit edilmesi sağlanmıştır. Bu tekniklerin gerçek dünya uygulamalarına aktarılması, özellikle otomotiv, havacılık ve makine mühendisliği gibi alanlarda tasarım süreçlerini daha verimli hale getirmektedir.
Figür 11’de MSC Nastran’da kontak kontrolü yapılmış bir parçanın sonuçlarının, Patran üzerinden kontrol edildiği gözükmektedir.
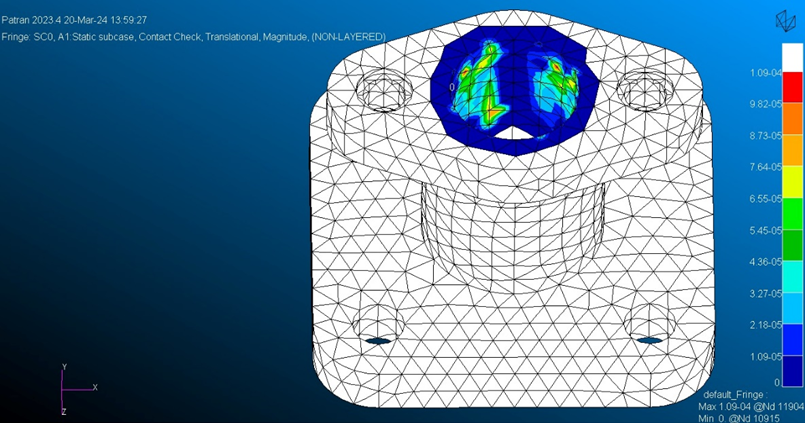 Figür 11 – Patran’da “Contact Check, Translational” Çıktısının İncelenmesi
Figür 11 – Patran’da “Contact Check, Translational” Çıktısının İncelenmesi
6-Referanslar
- MSC Nastran 2024.1 Quick Referance Guide
- Patran 2024.1 Help Section
- Hexagon Webinar- Speed Up Your Contact Analysis Process with MSC Nastran
- MSC Nastran User’s Guide
- NAS133 Workbook
- Cook, R. D., Malkus, D. S., Plesha, M. E., & Witt, R. J. (2002). Concepts and Applications of Finite Element Analysis (4th ed.). Wiley
- MSC Nastran (2019). Linear Contact Analysis White Paper. MSC Software Corporation

